Objective
Now that we have proven in the previous lab that our Bayes filter works in the simulation, we want to perform localization on our actual robot. For this lab, only the update step of the Bayes filter was implemented because the motion of the robot is too noisy and dependent on factors such as battery charge and friction between the wheels and the floor.Bayes Filter (Sim)
A class provided, fully functional Bayes filter was provided and demonstrated on the simulator as a sanity check. The results of the Bayes filter are similar to the results found in my own Bayes filter that I constructed in lab 10. The image above shows odometry (red), ground truth (green), and the belief of the robot (blue), of which the latter of two match fairly well. Small differences in the two may come from the discretization of the map; since the Bayes filter limits the location of the robot to a 12 x 9 rectangular grid, the belief is limited to a number of evenly spaced out locations.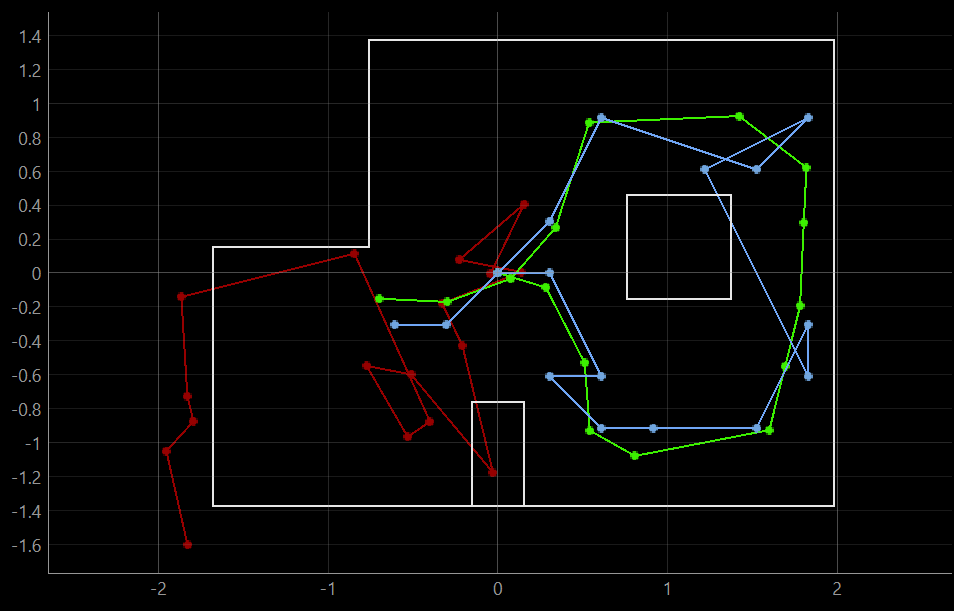
Bayes Filter (Real)
In order to perform localization on our robot, we created a perform_observation_loop() function as a part of the RealRobot() class. When this function is called, the robot will rotate a full rotation, and output a numpy array of ToF distance values and angular position values. The number of sensor readings depends on observations_count a variable defined in the world.yaml helper file. For this lab, observations_count = 18 and thus we take ToF distance measurements at equidistant 20 degree rotations. To implement this function, I reused code from lab 9 where I programmed the robot to rotate and collect distance measurements as quickly as possible. I modified the arduino code to collect data at specific theta values, rather than as quickly as possible as in lab 9. I pass via bluetooth a desired number of observations to the robot, which then rotates one time and collects that same number of observations at equidistant angles.//Output a number of distance measurements during one full rotation
case TASK:
{
Serial.println("Performing task...");
//Interprets bluetooth command to determine number of observations
int observations_count;
success = robot_cmd.get_next_value(observations_count);
if (!success) { return; }
while (theta <= 360 && millis() <= stop_time) {
getSensorData();
//If current angle is at desired angle
if (theta >= theta_read){
//Send data and update desired angle
send_data();
theta_read = theta_read + 360/observations_count;
}
//Closed loop control to keep rotation speed constant
pid();
speed = min_speed - pid;
if (speed > max_speed) speed = max_speed;
right(speed);
}
stop();
Serial.println("Task Complete");
break;
}
#Angular data from one rotation
[0.15, 21.346, 40.585, 60.405, 82.206, 100.447, 120.193, 141.573, 161.768, 181.545, 200.276, 220.428, 240.16, 261.271, 280.832, 300.679, 320.957, 341.487, 361.44]
#Each measurement is within 1-2 degrees of the desired sampling angle
class RealRobot(): async def perform_observation_loop(self, rot_vel): """Perform the observation loop behavior on the real robot, where the robot does a 360 degree turn in place while collecting equidistant (in the angular space) sensor readings, with the first sensor reading taken at the robot's current heading. The number of sensor readings depends on "observations_count"(=18) defined in world.yaml. Keyword arguments: rot_vel -- (Optional) Angular Velocity for loop (degrees/second) Do not remove this parameter from the function definition, even if you don't use it. Returns: sensor_ranges -- A column numpy array of the range values (meters) sensor_bearings -- A column numpy array of the bearings at which the sensor readings were taken (degrees) The bearing values are not used in the Localization module, so you may return a empty numpy array """ time_list = [] theta_list = [] distance_list = [] def callback(uuid, string_value): string_characteristic = self.ble.bytearray_to_string(string_value) str_list = list(map(float, re.findall('-?\d+\.?\d*', string_characteristic))) time_list.append(str_list[0]) theta_list.append(str_list[1]) distance_list.append(str_list[2]) observations_count = int(self.config_params["mapper"]["observations_count"]) self.ble.send_command(CMD.SET_SPEED, "90|1|90") self.ble.send_command(CMD.SET_PID, "1|0|0.1") self.ble.send_command(CMD.SET_POINT, str(rot_vel)) self.ble.start_notify(ble.uuid['RX_STRING'], callback) self.ble.send_command(CMD.TASK, str(observations_count)) await asyncio.sleep(120/rot_vel) ble.stop_notify(ble.uuid['RX_STRING']) sensor_ranges = np.divide(np.array(distance_list), 1000)[np.newaxis].T sensor_bearings = np.array(theta_list)[np.newaxis].T return sensor_ranges, sensor_bearings </pre>Results
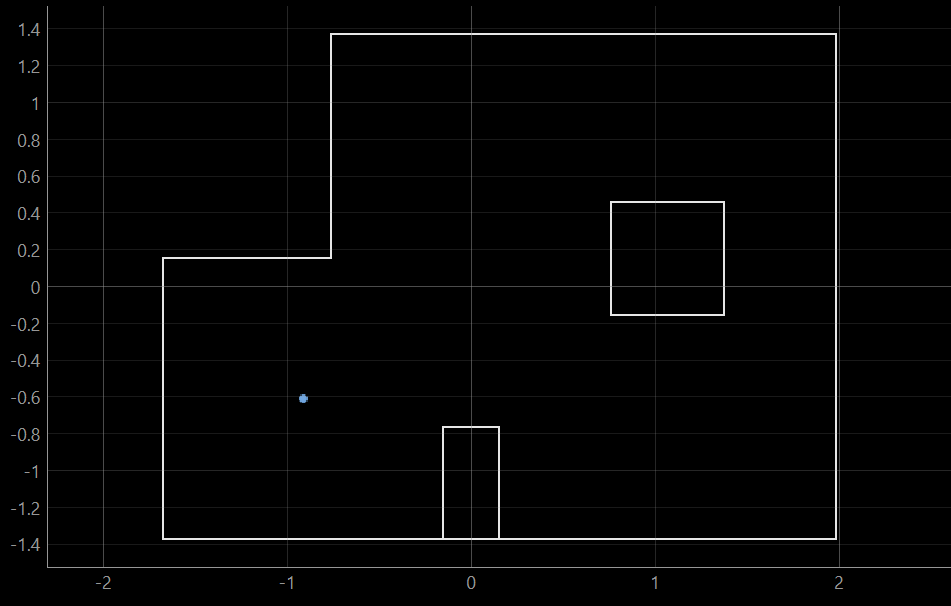
(-3, -2)

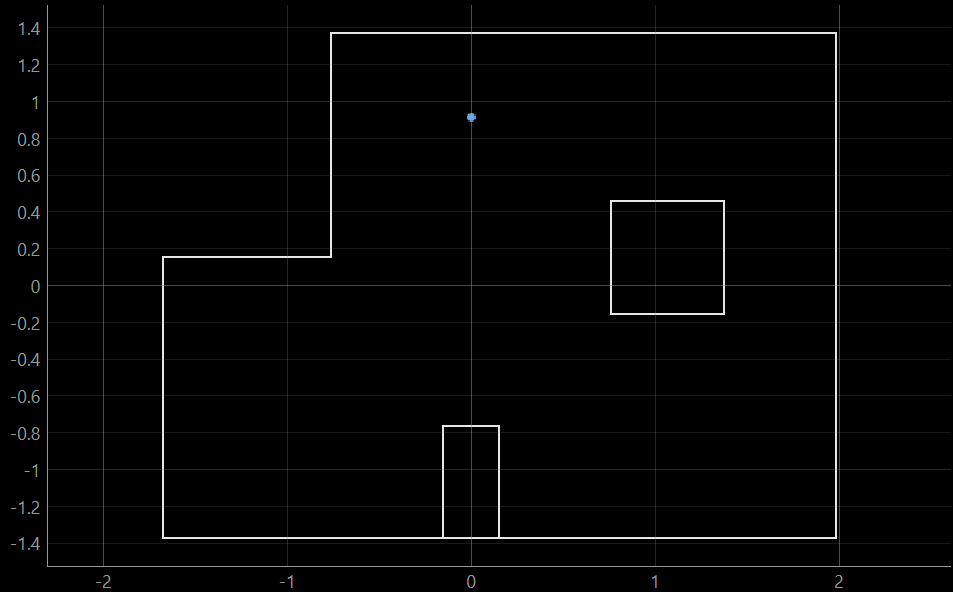
(0, 3)

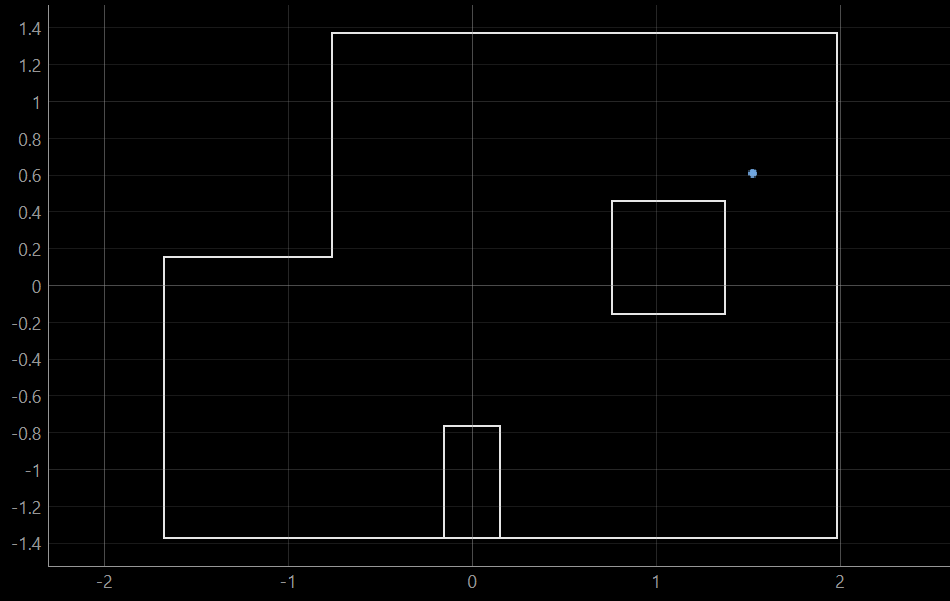
(5, 3)

(5, -3)

The robot has a very high confidence in its update position, and from the images above we can observe that the probability that the robot is at its belief is nearly 1 for all four locations. The predicted locations from the update step also matches well with the actual ground truth of the robot. All of the localization results were accurate except for the (5, 3) location which is off by one grid square vertically. However, although the robot accurately localizes its X and Y coordinates, the robot seems to think it is at a -10/-30 degree offset in all four update steps. From talking to the TAs it seems like this issue occurs in the localization.py module in the way that the grid is discretized. The angle space is discretized into 20 degree increments, but the robot is always at the center of these increments; instead of being at 0 degrees, the robot is either at -10 or 10 degrees. I plan to correct this issue in future labs.